기체 현황
· PAV는 크게 운용방식, 이착륙방식, 동력원 등으로 구성되며 이착륙방식 중 전기추진 및 비전기추진으로 구분됨
- 운용방식은 일반 항공기의 비행모드인 단일모드 및 지상과 공중으로 구분하여 운행하는 이중모드로 구분됨
- 이착륙방식 중 비 전기추진은 보통의 활주 거리(CTOL), 짧은 활주로(STOL) 및 활주로 없는 이착륙 방식(VTOL) 및 전력을 사용하여 이착륙이 가능한 PAV로 구분됨
- 동력원은 전통적인 추진 방법, 모터를 구동하는 방법 및 연료전지, 내연기관 등을 결합하는 방법 3가지로 구분됨
- 이착륙방식 중 비 전기추진은 보통의 활주 거리(CTOL), 짧은 활주로(STOL) 및 활주로 없는 이착륙 방식(VTOL) 및 전력을 사용하여 이착륙이 가능한 PAV로 구분됨
- 동력원은 전통적인 추진 방법, 모터를 구동하는 방법 및 연료전지, 내연기관 등을 결합하는 방법 3가지로 구분됨
UAM 기체 분류 방식
| 분류방식 | 기체 형식 | 정의 | |
|---|---|---|---|
| 운용방식 | 단일모드(Single Mode) | 일반 항공기의 비행모드 운행하는 PAV | |
| 이중보드(Dual Mode) | 지상에서는 일반 자동차 주행모드 운행, 공중에서는 비행모드 운행하는 PAV |
||
| 이착륙방식 | Non electric |
CTOL(Conve ntional Take-off and Landing) |
고정익 항공기와 유사한 형태로 이착륙시 보통의 활주 거리를 필요로 하는 통상적인 PAV |
| STOL(Short Take-off and Landing) | 짧은 활주로 또는 저속으로도 이착륙이 가능한 PAV | ||
| VTOL(Vertical Take-off and Landing) | 활주로 없이 수직으로 이착륙하는 PAV | ||
| electric | eVTOL(electric Vertical Take-off and Landing) | 활주로 없이 전력을 사용하여 수직으로 이착륙하는 PAV | |
| eCTOL(electric Conventional Take-off and Landing) | 기존 엔진을 전기 모터로 레트로피트(retrofit)하는 방식 | ||
| eSTOL(electric Short Take-off and Landing) | 짧은 활주로 또는 저속으로 전기 모터로 이착륙이 가능한 PAV | ||
| 동력원 | 내연기관(Internal Combustion Engine) |
화석연료를 에너지원으로 사용하는 전통적인 추진 방법 | |
| 전기 추진 시스템 (Electrical System) |
이차전지, 태양전지 등의 동력원에서 전력을 공급받아 모터를 구동하는 방법 | ||
| 하이브리드 시스템 (Hybrid-System) |
전기 동력을 이용하는 시스템에 연료전지, 내연기관, 발전기 등을 결합하는 방법 | ||
· 도심운항 요건 충족을 위해 eVTOL 중심의 Vectored Thrust, Lift+Cruise, Wingless(Multicopter) 등 다양한 형식의 기체개발이 진행되고 있으며, 일부 선도 기업들은 기체 양산 및 상용화를 위한 초입 단계에 진입
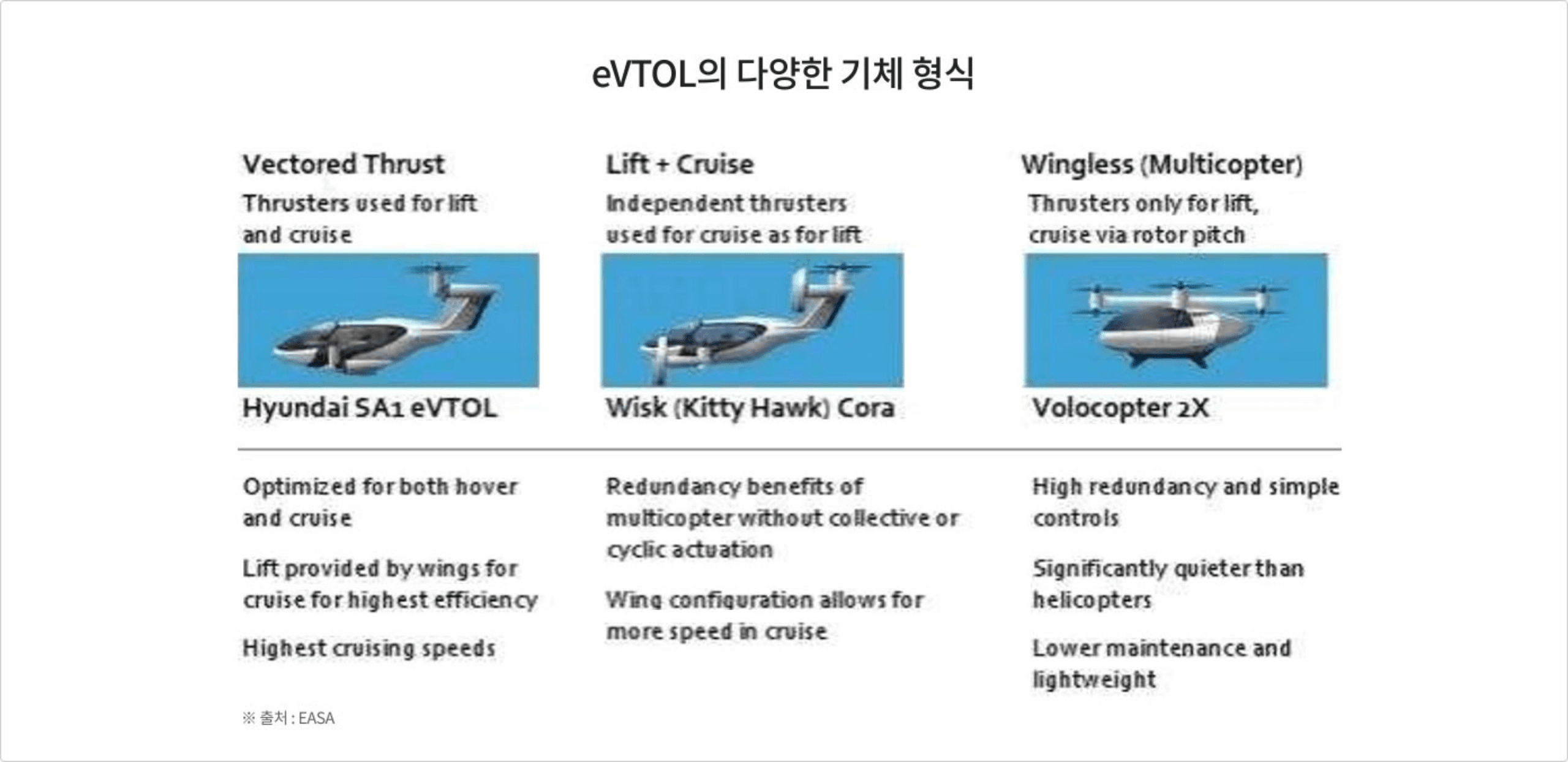
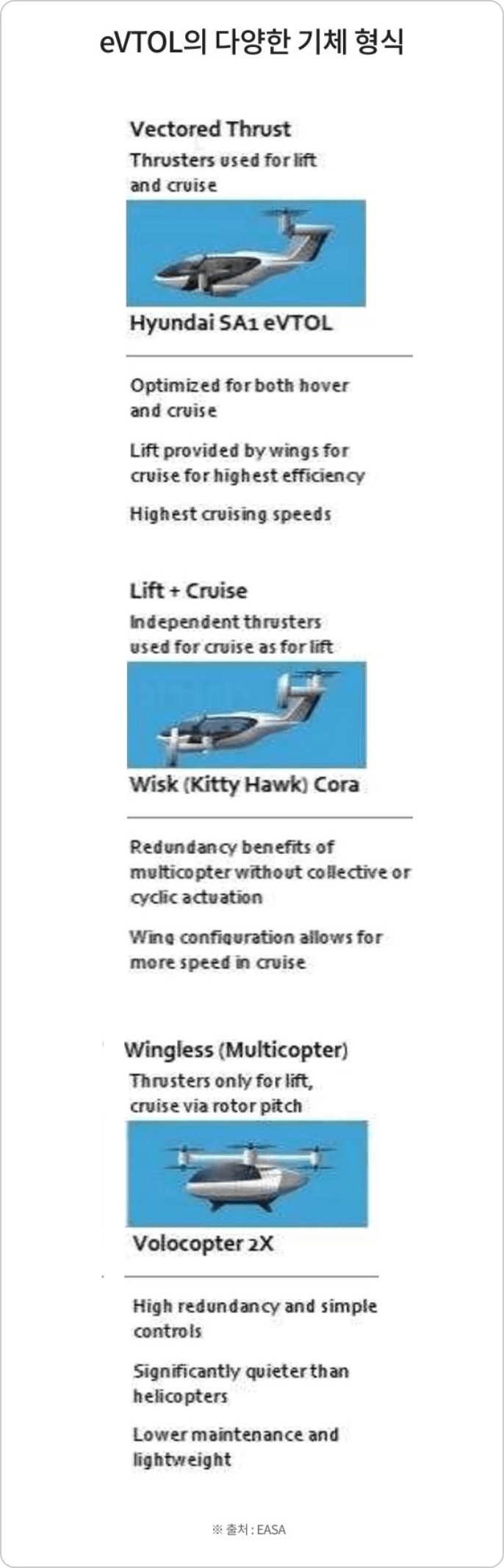
- 현재 개발 중인 eVTOL 기체 중 Vectored Thrust가 38%, Lift+Cruise 22%, Wingless가 약 40%를 차지함
- 1인승 기체가 40%를 차지하며, 3인승 이상이 32%를 차지하여 주요 개발국은 미국(46%), 유럽(34%), 기타(12%)임
- 1인승 기체가 40%를 차지하며, 3인승 이상이 32%를 차지하여 주요 개발국은 미국(46%), 유럽(34%), 기타(12%)임
Multicopter형 eVTOL 특성
· 고정날개가 없으며(Wingless형) 복수의 회전날개들로 구성된 추진동력을 장착하기 때문에 multicopter라고 한다.
· 복수의 모터-회전날개에 의한 비행하기 때문에 높은 비행안전성을 갖는다.
· 멀티콥터로 구동되기 때문에 정지비행(hovering)효율은 높으나 전진비행에는 효율이 낮은 단점이 있고 동력소모가 많아 항속거리와 항속시간에 많은 제한을 받는다.
· 비행속도는 통상 100 km/h 내외로 저속비행을 한다.
· 항속거리는 40 ~ 100 km 정도로 단거리 비행능력을 갖는다.
Lift+Cruise 형 eVTOL 특성
· 양력 추진부와 추력 추진부가 독립되어 있어 이착륙 모드와 순항비행모드를 선택적으로 사용한다.
- 양력발생을 위한 고정된 수직방향 로터(rotor)를 다수 장착
- 전진비행을 위한 분리된 다수의 프로펠러(propeller)로 추력발생 · 세 가지 비행모드(고정익, 회전익, 천이비행)로 비행한다. · Vectored thrust 보다 수직이착륙이 용이하다. · 순항비행 시 전진비행효율이 높은 장점이 있다. - 비행속도는 180 km/h 내외로 순항비행이 가능하다.
- 항속 거리는 80 ~ 150 km정도로 멀티콥터형보다 항속거리가 길다.
- 전진비행을 위한 분리된 다수의 프로펠러(propeller)로 추력발생 · 세 가지 비행모드(고정익, 회전익, 천이비행)로 비행한다. · Vectored thrust 보다 수직이착륙이 용이하다. · 순항비행 시 전진비행효율이 높은 장점이 있다. - 비행속도는 180 km/h 내외로 순항비행이 가능하다.
- 항속 거리는 80 ~ 150 km정도로 멀티콥터형보다 항속거리가 길다.
Vectored Thrust 형 eVTOL 특성
· Vectored Thrust는 로터를 틸트시키는 방법에는 크게 두 가지로 Tiltrotor형과 Tiltwing형이 있다.
- Tiltrotor: 프로펠러를 틸트시켜 수직모드와 수평모드로 상호전환
- Tiltwing: 프로펠러와 날개가 동시에 모드를 전환하는 방식
- Proprotor: 프로펠러와 로터를 결합한 형태 · 동일 추진부에 로터나 날개를 틸트시켜 프로펠러로 전환시키는 시스템이다. · 세 가지 비행모드(고정익, 회전익, 천이비행)로 비행한다. · 전진비행효율이 높고, 제자리비행(hovering)효율이 낮다. - 비행속도는 230 ~ 350 km/h 내외로 비교적 빠른 순항비행속도를 갖는다.
- 항속거리는 100 ~ 300 km 정도로 항속거리 또한 가장 우수하다.
- Tiltwing: 프로펠러와 날개가 동시에 모드를 전환하는 방식
- Proprotor: 프로펠러와 로터를 결합한 형태 · 동일 추진부에 로터나 날개를 틸트시켜 프로펠러로 전환시키는 시스템이다. · 세 가지 비행모드(고정익, 회전익, 천이비행)로 비행한다. · 전진비행효율이 높고, 제자리비행(hovering)효율이 낮다. - 비행속도는 230 ~ 350 km/h 내외로 비교적 빠른 순항비행속도를 갖는다.
- 항속거리는 100 ~ 300 km 정도로 항속거리 또한 가장 우수하다.
※ 출처 : 도심항공모빌리티 설계, 국민대 윤용현 교수